Inganta Aiki tare da MPU-6050: Saita, daidaituwa, da aikace-aikace
2024-04-25
9190
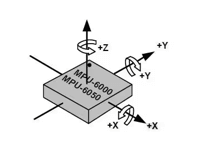
MPU-6050 Shin farkon duniya ta haɗu da bangaren aiki na 6-axis, wanda ke haɗa ma'aunin kayan motsa jiki 3, 3-axis scaserometer da kuma scalaby processor processor (dmp).Dalilin yin amfani da shi shine samun kusurwar abin da za a auna (kamar kuɗaɗe, motar da aka daidaita) akan x, y, da kusurwa da kusurwa da kuma yawd.Mun karanta bayanan shida na MPU-6050 (ƙimar tallar talla uku na AXIS uku na Axis na gyarawa) ta hanyar I2C ke dubawa.Bayan aiki mai ƙarfi, filin wasan, yi, da kuma an lasafta shi.A matsayina na ƙimar ƙimar ma'auni, ma'anar shugabanci na gudanarwa na firikwenin firam ɗin da ke ƙasa, wanda ke bin ka'idar tsarin daidaitawa na dama (wato madaidaicin babban yatsa na tsarin x-Axis, yatsan yatsa yana nuna tabbataccen shugabanci na y-axis, da yatsan yatsa yana da tabbataccen shugabanci na Z-Axis).
Tsarin litattafai
Tare da sadaukar da kai na I2C, da MPU-6050 ya sami damar karɓar shigar kai tsaye daga kamfas 3-Axis, samar da cikakken 9-Axis Motsuusion ™ Motsa fitarwa ay.Yana kawar da bambance bambancen tsakanin Gero da aka haɗe kuma yana haɓaka sararin ajiyar abubuwa idan aka kwatanta da hanyoyin da yawa.Lokacin da aka haɗa zuwa ga magnetomometer guda uku, mpu-60x0 yana da ikon samar da cikakken cikakken 9-axis ko Spi Port dinta yana samuwa ne kawai akan MPU-6000).
Madadin da daidaitawa
- Mpu-3300
- Mpu-6000
- Mpu-6500
Mai samar da MPU-6050
Wanda ya kera MPU-6050 shine TDK.Bayan kafafun da suka kafa TDK, Dr. Yogoro Kato da Takei Goi, ya kirkiri feryo a Tokyo, sun kafa Tokyo Denkikag Kogyo K.K.A cikin 1935. A matsayin Alamar Masana'antu na Wilficomics, TDK koyaushe yana ci gaba da zama mafi rinjaye a cikin filayen albarkatun lantarki da abubuwan lantarki.TDK na TDK na samfurin TDK da kuma provels samfurin samfuri da ke haifar da abubuwan haɗin yumɓu, aluminum, masu ɗaukar hoto, na'urorin kariya, da na'urori masu kariya,Magnetic da mems masu auna na'urori), da sauransu.Abubuwan samfuranta sun haɗa da TDK, EPCOS, Invensese, Micronas, tronics da TDK-Lambda.
Canjin ciki na ciki na MPU-6050
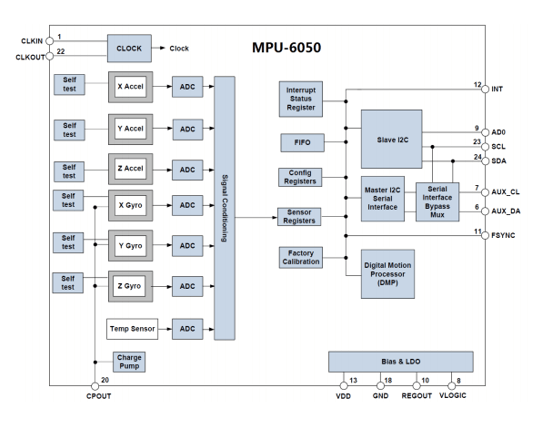
Daga gare su, SCL da SDA sune musayar IIC da aka haɗa da McUcu, da Mata suna nuna MPU-6050 ta hanyar wannan IIC ke dubawa.Hakanan akwai wannan ma'amala, wato Ax_cl da Aux_da.Ana iya amfani da wannan keɓaɓɓen don haɗa na'urorin bawa na waje, kamar su masu aikin motsa jiki na magnetic, don ƙirƙirar firikwensin sau tara.Vlogic shine Port Voltage.Wannan PIN na iya tallafawa mafi ƙarancin 1.8v.Yawancin lokaci muna haɗa shi kai tsaye zuwa VDD.AD0 shine adireshin da ke sarrafawa IIC ke dubawa (an haɗa shi da McUCU).Wannan fil yana sarrafa mafi ƙarancin adireshin IIC.Idan an haɗa shi da GND, adireshin IIC na MPU-6050 shine 0x68;Idan an haɗa shi da VDD, yana 0x69.Lura cewa adireshin anan bai hada da mafi ƙarancin watsa bayanan bayanai ba (mafi ƙarancin bit ana amfani da shi don wakiltar karanta da rubuta ayyukan).A kan MwBAcateigstc15, Ad0 an haɗa shi da GND, don haka adireshin IIC na MPU-6050 shine 0x68 (ban da mafi ƙasƙanci kaɗan).
Fara da IIC Murance
MPU-6050 yana amfani da IIC don sadarwa tare da StC15, saboda haka muna buƙatar ƙaddamar da SDA da SCL bayanan bayanan SCL da aka haɗa zuwa MPU-6050 farko.
Sake saita MPU-6050
Wannan matakin ya dawo da dukkan rajista a cikin mpu-6050 zuwa ga tsoffin dabi'u, wanda aka samu ta hanyar rubuta 1 zuwa bit (0x6b).Bayan sake saiti, za a mayar da martani na iko 1 zuwa ga tsohuwar ƙimar (0x40), kuma dole ne a saita wannan rajista zuwa jihar motsa jiki.
Saita cikakken kewayon kewayon angular mai nauyi (gyro) da hanzarta firikwensin
A cikin wannan mataki, mun saita cikakken kewayon sikelin (FSR) na na'urori masu amfani da kayan aikin motsa jiki (0x1b) da kuma yin rijistar Kanfigareght.Yawanci, mun saita cikakken kewayon Gyrospope zuwa ± 2000DPs da cikakken kewayon kewayon da aka kafa zuwa ± 2G.
Sanya sauran sigogi
Anan, muna buƙatar saita sigogi masu zuwa: Kashe kashewa, kashe Auto I2C, saita matatar tace-rani, kuma saita ƙasa-ent tace (DLPF).Tun da ba muyi amfani da katse bayanai don karanta bayanai a wannan babi ba, aikin katse yana buƙatar kashe aikin.A lokaci guda, tunda ba ma yin amfani da dubawa na Aux I2C don haɗa sauran masu aikin sanyaya waje, muna buƙatar rufe wannan dubawa.Ana iya sarrafa waɗannan ayyuka ta hanyar ba da izinin karɓar rajista (0x38) da rajistar mai amfani (0xuna).MPU-6050 na iya amfani da FIFO don adana bayanan firikwensin, amma ba mu yi amfani da shi ba a cikin wannan babi ba, don haka duk tashoshin FIFO, don haka duk tashoshin FIFO suna buƙatar rufe su.Ana iya sarrafa wannan ta hanyar mai kunna FIFO (0x23).Ta hanyar tsoho, ƙimar wannan rajistar shine 0 (wato, Fidan), don haka zamu iya amfani da tsohuwar darajar kai tsaye.An sarrafa samfurin kayan motsa jiki na sauro ta hanyar samfurin rarrabuwar ƙasa (0x19).A yadda aka saba, mun saita wannan samfurin kuɗi zuwa 50. Ana yin saiti na tace-Pass-Pass (DLPF) ta hanyar rijista (0x1a).Gabaɗaya magana, zamu saita DLPF zuwa rabin bandwidth don daidaita daidaito da daidaito da saurin amsawa.
Sanya tushen agogo na tsarin kuma a kunna lafiyayyen mai gudu da hanzari
Saitin tushen tsarin tsarin ya dogara da rajista na sarrafa iko 1 (0x6b), inda mafi ƙasƙancin rago uku ke ƙa'idar wannan rajista.Ta hanyar tsoho, an saita waɗannan ragowa uku zuwa 0, wanda ke nufin tsarin yana amfani da tsarin ciki 8mhz rc oscilloror a matsayin tushen agogo.Koyaya, domin inganta daidaitawar agogo, yawanci muna saita shi zuwa 1 kuma zaɓi X-Axis Gyroscope PLL kamar yadda agogo na agogo.Bugu da kari, yana ba da damar simintority na gyaran kayan kwalliya kuma yana da mahimmanci mataki a tsarin farawa.Dukkanin ayyukan biyun suna aiwatar da su ta hanyar sarrafa iko 2 (0x6c).Kawai saita bit zuwa 0 don kunna m poryor.Bayan kammala matakan da ke sama, MPU-6050 na iya shigar da matsayin al'ada.Waɗannan masu rajistar da ba a saita su musamman za su yi amfani da tsoffin dabi'un saiti ba.
Ta yaya aikin MPU50?
Gyro firikwensin
Sensor yana sanye da Gyro a ciki, wanda zai kasance tare da layi ɗaya zuwa ga alamar farko saboda tasirin motsa jiki.Sabili da haka, zamu iya yin lissafin shugabanci da kusurwa ta juyawa ta hanyar gano karkatar da Gyro daga farfajiyar farko.
Uplerometer firikwo
AnalimaSor Senteror na'urar na'ura wacce zata iya adawar hanzari kuma tana aiki bisa ka'idar Piezoeclectric tasiri.Yayin hanawa, firikwensin yana auna karfi da makamar aiki wanda aka amfani da shi a kan taro kuma sannan ƙididdige darajar hanzarta ta amfani da dokar Newton.
Processor Motsa Motsa Mockal (DMP)
DMMM ɗin aiki ne na bayanai a cikin guntun MPU65050 wanda ke da ginanniyar ƙasa Kalman da aka shirya da kuma sarrafa kayan aikin motsa jiki da sarrafa abubuwan kwantar da hankali.Wannan fasalin yayi matukar rage aikin microphrocessor kuma yana guje wa trion trioning tsari.
Bayanan kula:
Quashendes: Quaintingtion lambobi ne masu sauki superclex.Lambobin hadaddun sun hada da lambobi na gaske da naúrar naúrar I, inda ni ^ 2 = -1.
Ina ne MPU-6050 amfani?
- Toys
- Wordset da wasa mai ɗaukar hoto
- Masu Gudanar da Game Game
- BLURFRE ™ Fasaha (don bidiyo / Har yanzu Hoto Hoto)
- Airsign ™ Fasaha (don Tsaro / Tabbatarwa)
- kalmar sirri ™ ™ Yarnture
- Masu aikin kwalliya na lafiya don lafiya, motsa jiki da wasanni
- wasan da aka kunna da tsarin aikace-aikacen
- Fasaha ta Moti Movie (don Bayyanar Takaita)
- Sabis na tushen wuri, wuraren ban sha'awa, da matattu hisabi
- Gudanar da nesa na 3D don yanar gizo da aka haɗa DTVS da saita manyan akwatuna, mice 3D
- Touchany Wild ™ fasaha (don "ba taɓa" UI Aiwatarwa / kewayawa)
Kunshin MPU-6050

Yadda za a rage hayaniyar MPU-6050?
Zamu iya daukar wadannan hanyoyi don rage hayaniyar MPU-6050.
Yi amfani da na'urori masu auna kibori
Kirkiro da Ilyemerometer da MPU-6050 na iya kawar da nuna wa nuna halin da kansu, saboda haka rage tasirin amo.Tsarin daidaitawa yawanci yakan ƙunshi matakai biyu: daidaituwa na ƙididdiga da daidaitawa motsi.
Tsarin karuwar kayan aiki
Dingara masu ɗaukar hoto zuwa layin wutar lantarki MPU-6050 na iya rage tasirin hayaniyar samar da wutar lantarki akan firikwensin.A halin yanzu, a lokacin PCB Layal, ya kamata mu yi ƙoƙarin ci gaba da MPU-6050 nesa daga iyakar siginar rudani da kuma kayan siginar sigina.
Aiki total
Bayan tattara kayan raw bayanai daga MPU-6050, zamu iya ƙara hanyar tace totarware don aiwatar da bayanan farko don kawar da tsangwama na farko.Hanyoyin da aka saba amfani da su na software software sun hada da ma'anar tace, tace median, Kalman tace da sauransu.
Yi amfani da matatar wucewa ta ciki
MPU-6050 yana da haɗin tacewar ƙasa mai ƙarancin ƙasa, wanda za'a iya amfani dashi don rage amo mai yawa ta hanyar saita mitar mitar.Musamman, zamu iya saita mitar ta dijital ta hanyar gyara rijistar Yarjejeniyar MPU-6050 don kawar da hayaniyar mitar da aka haifar ta hanyar / di samfotic.
MPU-6050-tushen motsi na motsi
MPU-6050 seadetometer ne mai sau shida da kuma firikwensin kayan ado wanda za'a iya amfani dashi don auna motsi da halaye na abubuwa.Matakan motsi ya samo asali ne daga MPU-650 za a iya gane su ta hanyar matakan:
Mataki na farko shine karanta bayanan firikwensin.Muna buƙatar karanta bayanan da ake amfani da su da kayan motsa jiki daga bayanan motsa jiki daga mpu-60 cose suna amfani da na'urori masu dacewa da direbobi da suka dace da ayyukan laburare.Waɗannan bayanan yawanci suna fitarwa a cikin tsarin dijital, don haka wasu canje-canje da aikin daidaitawa ana buƙatar sauya su zuwa ainihin matakan.
Mataki na biyu shine yin lissafin hanzari.Da farko, muna buƙatar aiwatar da bayanai daga cikin halaka don samo hanzari na abu a cikin kowane gunduma.Bayan haka, domin yin lissafin gudu da gudun hijira na abu a cikin kowane axis, muna buƙatar haɗa hanyoyin haɗakarwar hanzari.Adireshin Haɗin kai, kamar hanyar Euler ko hanyar Lunger-Kuter, ana amfani da shi sau da yawa a cikin wannan tsari don tabbatar da daidaito na ƙididdigar gudun.
Mataki na uku shine a lissafta gudu na angular.Ta amfani da bayanan GyroScope, an yi amfani da farjin abu a cikin kowane axis.Haka kuma, wannan bayanan yana buƙatar ɗaukar hoto kuma an canza shi don samun ƙarfin rafi a cikin ɗakunan jiki.
Mataki na huɗu shine a lissafta juyawa.Ta hanyar haɗa bayanan da aka ficewar tsallakewar ƙwayar cuta, kusurwar juyawa na abu a cikin kowane axis za'a iya lissafta.Ana iya yin wannan ta amfani da dabaru na haɗin kai kamar hanyar Euler ko hanyar Longe-Kutta don ƙididdige kusurwa.
Mataki na biyar shine a hada bayanan.Mun haɗu da bayanai daga halaye da gyroscopes don samun cikakken hali da kuma bayanin matsayin abu.Ana iya yin wannan ta amfani da algorithms kamar mai son tushen masifa ko kuma masaniyar mai sihiri.
Mataki na shida shine hango sakamakon.Mun canza yanayin motsi da aka lissafa a cikin jerin abubuwan da ke cikin tsarin daidaitawa na 3D kuma nuna shi ta amfani da kayan aikin gani da kuma fahimta ta hanyar da ta dace.
Tambayoyi akai-akai [Faq]
1. Yaya daidai ne mpu650?
Sakamakon da aka samu ya nuna isasshen daidaituwa na kasa da 1% da aminci, tabbatar da dacewar girman mai ɗaukar hoto da manyan ka'idojin masana'antar.
2. Yadda ake karanta bayanai daga MPU650?
Don karanta rajista na ciki MPU650, Jagora ya aiko da yanayin fara, sai adireshin I2C Badawa da rubutu, sannan kuma adireshin rajista wanda za'a karanta.
3. Ina MPU650 aka yi amfani da su?
A cikin sawu mai lafiya mai wuya, na'urorin bijirar motsa jiki.A Drones da QuadCopers, MPU650 ana amfani dashi don sarrafa wuri.Amfani a cikin sarrafa robotic.Na'urorin kulawa ta hannu.
4. Shin MPU650 AMU?
MPU650 IMU Sensor toshe yana karanta bayanai daga MPU-6050 Sensor wanda ke da alaƙa da kayan aikin.Tufafin yana fitowa da hanzari, ƙimar ƙwayar cuta, da zazzabi tare da axes na firikwensin.
5. Menene aiki na MPU650?
Wannan shine proupor procector wanda ya haɗu da bayanan da ke fitowa daga iskerometer da gyrecope.DMP shine mabuɗin amfani da MPU650 kuma an yi bayani dalla-dalla daga baya.Kamar yadda duk microrocrocessors dmp bukaci Firmware don gudu.
Gwajin aikin.Mafi yawan kayayyaki masu tsada da kuma mafi kyawun sabis shine madadinmu na har abada.
Tarihin zafi
- Shin CR2032 da kuma mr2016 m
- Ma'anar Mosufet: Ma'anar Itauki da Zabi
- Shiga ciki da Gwaji, Fassarar zane-zanen Relay Wirging
- CR2016 VS. CR2032 Menene bambanci
- NPN vs. PNP: Menene bambanci?
- ESP32 vs StM32: Wanne microcontroller ya fi muku kyau?
- LM358 Dual Properful Holdal Isasshen Jagora: Pinuts, Canjin zane, daidaitawa, daidaitawa, misalai masu amfani
- CR2032 vs DL2032 Jagorar CR2025
- Fahimtar bambance-bambance ISP32 da ISP32-S3 fasaha na fasaha da bincike na aikin
- Cikakken cikakken bayani game da jerin jerin Rc
 Binciken iyawa da aikace-aikacen Sadarwar NRF24l01
Binciken iyawa da aikace-aikacen Sadarwar NRF24l01
2024-04-25
 MMBT3904 NPN Transistor: Bayaninta Bayaninta, Cikakken Shirye-shiryen Sakamakon Jagora, da MMBT3904
MMBT3904 NPN Transistor: Bayaninta Bayaninta, Cikakken Shirye-shiryen Sakamakon Jagora, da MMBT3904
2024-04-25
Lambar mai zafi
 GRM1555C1H360GA01D
GRM1555C1H360GA01D CL32C472JBFNNNE
CL32C472JBFNNNE GRM0225C1E4R7BA03L
GRM0225C1E4R7BA03L C2012X6S1E225M125AC
C2012X6S1E225M125AC- GRT155R61C224ME01D
 GRM0335C2A3R5CA01D
GRM0335C2A3R5CA01D- CL03C030BA3GNNH
- GJM0335C1E8R0CB01D
 0805YG104ZAT2A
0805YG104ZAT2A 12102C104JAT2A
12102C104JAT2A
- 06033C182KAJ2A
- GRM0336T1HR50BD01D
- GRM0337U1H7R2CD01D
- AX2000-FG896
- LE9531CETC
- AT49LH004-33JC
- VI-253-MX
- THC63LVD104C
- CY7C1270KV18-400BZXC
- AP2161DMPG-13
- VI-244-EV
- MCC19-14io1
- MCC255-08IO8
- VI-264-EU-BM
- LTC2704IGW-14
- MC74LVX244DTG
- UCC27527DSDR
- ADM1024ARU
- T491D475K050AT7280
- TPA6010A4PWPR
- T491C476M016ZTZS10
- T491B156K020ZT7280
- AC80566UC009DV
- ACS710TKLA-25CB
- ADV7120KS
- K9F1G08ROB-JIBO
- MBM29F040A-90PD
- MK3732-26GLFTR
- RJK0301DPB-00#J0
- SC1402ISSTR
- TB1004AF
- UPD72001G-11-22
- CX82100-41
- MST9B884JL-LF-3
- MSM51V17400F-60SJ
- MST8011B-LF
- SPC5604BVLH6
- TPS65913B2DAYFFR
- A25LQ64M-F/Q